
Здравствуйте, гость ( Вход | Регистрация )

  |

 6 May 2008, 14:04 6 May 2008, 14:04
Сообщение
#1
|
||||||
|
Advanced Member  Группа: Moderators Сообщений: 841 Регистрация: 27-December 07 Из: Москва Пользователь №: 57 Место Жительства:Москва Возраст:68 |
Работа со шкотами моделей имеет свои особенности. Механика их приводов должна отвечать условиям работы, сильно отличающимся, например от условий работы рулевого привода.
Ниже попробую изложить свои соображения по устройству этого механизьма. Естественно, мнения и рассуждения чисто субъективные и не претендуют на абсолютную истинность. Первая неприятность на пути поиска решения - непригодность для копирования лебедок применяющихся на настоящих яхтах. Все они, за исключением экзотических конструкций автопилотирования, рассчитаны на присутствие важной детали - оператора. Дело в том, что работают они только при наличии нагрузки на шкоты. В реальных конструкциях эту нагрузку создает шкотовый, натягивая ходовой конец шкота и создавая нужное трение на барабане. Именно по этому в заголовке темы "лебедки" стоят в кавычках. Скоре можно назвать их приводами шкотов. Так что о такой схеме забудем сразу. Что бы яснее представить что нам надо, определим условия работы устройства. 1. Диапазон нагрузки - непостоянный. От нуля до максимума момента создаваемого парусом. 2. Наличие рывков превышающих по силе обычную тягу. 3. Желательно иметь экономичное устройство, не требующее большой емкости аккамуляторов. 4. Естественно, механизм должен быть надежным, не допускающим заедания и захлестов шкотов. 5. Механика должна иметь приемлимое бысродействие. Некоторые констркуции, что применяются на моделях, тоже используют барабаны. Но, для более-менее надежной работы требуют укладчики. Может быть это мое заблуждение, но действительно надежных конструкций такого рода я не встречал. Следующая схема - подобна тем, что применяются на приводах рулей.
Это обычная машинка, но с длинным рычагом. По работе более надежна, чем барабан. Однако... требует большого момента на валу. Плече рычага должно обеспечивать ход, достаточный для выборки всего шкота. А это не мало. С увеличением длинны рычага увеличивается и момент который должна создать машинка. То есть, машинка должна быть мощной. Кроме того, рулевые машинки, как правило, сторят на основе обычных шесерен. При работе же паруса на шкоте постоянно присутствует усилие, которое стремится повернуть рычаг. Машинка, естественно, компенсирует поворот. Что заставляет ее постоянно работать и расходовать энергию аккамулятора. Схема с колцевыми поводками, мне кажется, более привлекательна. Даже при использовании в качестве привода обычной серво машинки, она более экономична, чем рычажная и, безусловно надежне, чем барабанная. При использовании синхронного зубчатого ремня, исключающего проскальзывание и червячного редуктора она становится весьма привлекательной.
Еще один вариант: винтовой привод. Из перечисленных это, пожалуй самый оптимальный вариант. Минусы - необходимость изготовления длинного винтового вала и сложность организации обратной связи от датчика положения. Покупка и установка готовых приводов особых проблем не имеет, а потому дальше попробую описать два последних варианта для изготовления по "наколенной" технологии. Конкретных чертежей не даю.Технология предусматривает свободу в выборе отдельных компонентов конструкции и сильно зависит от наличия в запасах моделиста всякой всячины. Итак - кольцевые поводки. Схема основана на том, что сами шкоты не наматываются на барабан. Это исключает их запутывание. Конечно, места для такой конструкции надо больше, чем для барабанного варианта. Но, на модели яхты это не проблема. Основа конструкции - привод. Он должен создавать необходимое усилие, обладать нужным быстродействием. Желательно исключить влияние тяги паруса и рывков шкотов.
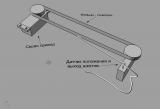
В конструкции на фото применен чевячный привод от убитого CD дисковода. Но можно использовать и обычную серво машинку. В ней надо переделать кое что. Первое - убрать упоры - ограничители угла поворота. Второе - отключить переменный резистор - датчик положения. Вместо него будет подключен многооборотный резистор. В этом варианте применен синхронный ремень от принтера. удобен он тем, что исключает проскальзывание на валах. Вместо него можно, конечно применить и обычный троссик. Для создания нужного трения его надо положить на валы петлями в один шлаг ( оборот ). Хорошо протереть шнур канифолью. Больше одного шлага класть не стоит, - возрастает вероятность захлеста шнура на барабанах. Расстояние между валами - чуть больше ходовой длинны шкота. Для полной гарантии можно поставить перед барабанами отбойнички. они не дадут шкоту затянуться на барабан. На фото ниже узлы датчика положения и привода.
С приводом все понятно. Датчик положения - многооборотный резистор с длинной осью. На нее посажен зубчатый барабан. Датчик лучше ставить зависимым от ремня. Тогда, даже при сллучайном проскальзывании на ведущем валу, он даст истинное положение шкота. Проскальзывание на валу датчика мало вероятно. Второй резистор, видимый на фото служит для подстройки длинны хода ремня. Электроника использована от старой сервомашинки. Выход шкотов должен быть расположен около одного из валов. Дальнейшая разводка зависит от воли моделиста. Но, следует избегать резких перегибов и большого трения на них. Сами шкоты лучше делать из хорошо скользящей нити. Конечно, это только один из вариантов механики. Можно, например отказаться от общей платы и закрепить узлы на наборе корпуса. Надо только не забыть, что придеться обслуживать механику и обеспечить доступ к ней. Винтовые приводы более экономичны. Двигатель работает только в момент перемещения. Внешние же нагрузки принимает на себя винтовая пара. Кроме того, двигатель может быть менее мощным, так как на паре потери меньше, чем на системе валы - ремень. Но, о них позже. -------------------- Самая частая ошибка в том, что мы делаем не так как надо, а так как умеем.
Гремучая змея - очень милое и дружелюбное существо. Надо только знать, как с ней обращаться. Вопрос не может быть глупым, ибо есть свидетельство работы ума. Что глупости не свойственно. |
|||||
 |
 
|
|||||







|
8 May 2008, 00:57
Сообщение
#2
|
|
|
Newbie Группа: Members Сообщений: 6 Регистрация: 10-April 08 Пользователь №: 278 Место Жительства:Riga, latvija Возраст:35 |
С приводом все понятно. Датчик положения - многооборотный резистор с длинной осью. На нее посажен зубчатый барабан.
Датчик лучше ставить зависимым от ремня. Тогда, даже при сллучайном проскальзывании на ведущем валу, он даст истинное положение шкота. Проскальзывание на валу датчика мало вероятно. Второй резистор, видимый на фото служит для подстройки длинны хода ремня. Электроника использована от старой сервомашинки. Есть вопрос по нарактеристике многооборотника. Проситса А. Второй вопрос по регулировке. С "умным" управлением ясно, а с дешовым? Имеем: ремень, шестерни, червяк, дешовое управление ну и желаемый ход. Желаемый ход допустим равен 4-ем длинам ведомой шестерни. За 4-е оборота многооборотник изменится мало, а мое дешовое управление захочет весь диапазон.  Есть ли шанс на его использование? Еще вопрос. Кто жрет энергию? Крутить мотор в етой схеме ремень вроде не должен, (червяк не даст). Мотор - колекторный, не шаговый. Он вроде должен резистор повернуть, и баиньки до следующей команды, или до момента когда враги резистор повернут сами. Или я не правильно понимаю работу сервы? |
|
|
|

|
8 May 2008, 02:24
Сообщение
#3
|
|
|
Advanced Member Группа: Moderators Сообщений: 841 Регистрация: 27-December 07 Из: Москва Пользователь №: 57 Место Жительства:Москва Возраст:68 |
Если стоит червяк, все проще. Хотя, могут быть проблемы, если шаг его большой. Тогда его может проворачивать. Если же редуктор без червяка, то... или жертвовать скоротью, наращивая момент, или мириться с прокручиванием.
Как всегда с лодками приходиться искать компромисс: больше барабан - быстрее ход и меньше оборотов надо сделать. Но и момент на него нужно болший. Ко всему добавляется фактор наличия деталей. Пара ремень - шкивы диктуют свои условия. Делать самому зубчатку - не самое простое дело. приходиться подбирать по наличию. По резистору: У меня стоит 10Ком. Без добавочного диапазон регулировки - 14 оборотов. Это примерно полторы длинны хода. Добавочным сжимаю его до нужного значения. Схема типовая для MS1660L только там датчик - 4,7Ком. Второй подстроечник включен в одно из плеч датчика. -------------------- Самая частая ошибка в том, что мы делаем не так как надо, а так как умеем.
Гремучая змея - очень милое и дружелюбное существо. Надо только знать, как с ней обращаться. Вопрос не может быть глупым, ибо есть свидетельство работы ума. Что глупости не свойственно. |
|
|
|
|
8 May 2008, 20:01
Сообщение
#4
|
|
 Advanced Member Группа: Members Сообщений: 82 Регистрация: 6-January 08 Из: Питер Пользователь №: 91 Место Жительства:Питер Возраст:39 |
не знаю нужно ли сейчас так мудрить. Уже выпускаются фирменные мощные именно парусные сервы. Например, вот такие:
http://www.hitecrcd.com/servos/show?name=HS-815BB Такая стоит на моём метрвом СиВинде. Мощи достаточно вполне. Хода шкота тоже - 200мм. Думаю, что и на спортивную метровку она пойдёт без проблем. Зато время полной перекладки несравнимо даже с очень хорошими фирменными лебёдками. Самодельные лебёдки есть разные, есть такие, которые делают 3 оборота за 0.8сек. Но нужно ли так мудрить? Сам сначала думал о лебёдках, но после этой сервы, попробовал модель с лебёдкой и был поражён насколько медленно выбирается шкот. -------------------- Андрей
www.andruha.stormway.ru |
|
|
|
|
8 May 2008, 22:53
Сообщение
#5
|
|
|
Advanced Member Группа: Moderators Сообщений: 841 Регистрация: 27-December 07 Из: Москва Пользователь №: 57 Место Жительства:Москва Возраст:68 |
Цитата(GOLF_stream @ 8 May 2008, 21:01)  Но нужно ли так мудрить? Аргументы такие: 1. Потребление. 2. Стоимость. Гоночной лодке, которой надо пройти только дистанцию, можно позволить себе иметь на борту акки, заменяемые после финиша. Для более длительных покатушек такая роскошь уже сомнительна. А, скажем, в варианте дальних плаваний, вообще не реальна. ( Развлекался иногда совместным походом байды и модели. Сейчас тоже, но с участием Тшки. ) Стоит эта штучка 50 зеленых. Не каждый мальчишка может позволить себе такую покупку. А еще... хочется иногда помудрить. Об этом много написано. Однако, спорить тут не о чем. Кому то в кайф погонять на готовом. А кому то важен сам процесс постройки. -------------------- Самая частая ошибка в том, что мы делаем не так как надо, а так как умеем.
Гремучая змея - очень милое и дружелюбное существо. Надо только знать, как с ней обращаться. Вопрос не может быть глупым, ибо есть свидетельство работы ума. Что глупости не свойственно. |
|
|
|
|
24 May 2008, 19:57
Сообщение
#6
|
||
|
Advanced Member Группа: Moderators Сообщений: 841 Регистрация: 27-December 07 Из: Москва Пользователь №: 57 Место Жительства:Москва Возраст:68 |
Винтовые механизмы.
На мой взгляд - самые выигрышные.
Нагрузка надежно изолирована винтом, который воспринимает все внешние возмущения. Момент, развиваемый винтовой парой, позволяет работать на прямую от вала двигателя. Что дает весьма неплохую скорость реакции. Движение поводка - прямолинейное. Недостаток - ну, может быть, несколько большая трудоемкость. На фото вариант конструкции. Ходовая шпилька с резьбой М3. Латунная, покупная. Резать самому резьбу такой длинны, эанятие хоть и не простое, но вполне реальное. При условии ухода вполне допустимы и железиевые шпильки. Двигатель более мощный, чем в предыдущей конструкции. Работает он напрямую с винтовой парой и должен обеспечивать достаточный момент. Вполне допустимо, за счет скорости конечно, применить редуктор для увеличения момента без увеличения мощности двигателя. При использовании резьбы другого размера надо учитывать зависимость: При увеличении шага скорость реакции будет выше, но нужен больший момент вращения. Увеличивая диаметр шпильки, так же надо увеличить момент вращения. Редуктор, видимый на фото служит только для согласования в датчиком положения. При настройке нужно обязательно снять ходовую гайку со шпильки. За тем, поставив ручку управления в среднее положение ждем когда система поставит датчик в положение остановки и проверяем направления вращения шпильки при перемещении ручки. Теперь можно поставить ходовую гайку на место. Для этого переводим ручку в крайнее положение, с тем, что бы при обратном движении гайка навинчивалась на шпильку. Делаем это аккуратно, не давая ей упереться в конец резьбы. Дальше нужно подобрать диапазон преремещений дополнительным подстроечником. Советую при применении стандартных схем управления немного их изменить. Надо найти проводник питания лоической части схемы, за тем найти участок этого проводника котоый идет к силовым транзисторам. Отрезать питание силовой части и перепаять провод от аккамуляторов, запитав от него только силовую схему. На логику питание надо подать через стабилизатор. Это исключит изменение настроек при разряде батареи. кроме того, появиться возможность подать на двигатель болшее напряжение без опасения сжечь логику. Приемник в этом варианте лучше запитывать от этого же стабилизатора. Сообщение отредактировал Soling - 26 Apr 2009, 22:05 -------------------- Самая частая ошибка в том, что мы делаем не так как надо, а так как умеем.
Гремучая змея - очень милое и дружелюбное существо. Надо только знать, как с ней обращаться. Вопрос не может быть глупым, ибо есть свидетельство работы ума. Что глупости не свойственно. |
|
|
|
|
|

|
29 May 2008, 11:37
Сообщение
#7
|
|
|
Advanced Member Группа: Moderators Сообщений: 841 Регистрация: 27-December 07 Из: Москва Пользователь №: 57 Место Жительства:Москва Возраст:68 |
ВНИМАНИЕ!
Конструкции, приведенные выше не пригодны к прямому копированию. Для конкретной лодки нужно продумывать параметры приводов, ориентируясь на конкретные условия плавания. Например, для простых покатушек совсем не обязательно ставить могучую серву, способную выбрать шкоты за пол секунды. Соответственно и расход от акков будет меньшим. И конструкция проще. А вот на гоночный аппарат стоит придумать серьезный механизьм, исключающий сбои и с большим запасом по моменту. Посчитать редуктор не сложно. Рассчет винтовой пары можно сделать по: http://www.a123systems.ru/index.php?showtopic=105 -------------------- Самая частая ошибка в том, что мы делаем не так как надо, а так как умеем.
Гремучая змея - очень милое и дружелюбное существо. Надо только знать, как с ней обращаться. Вопрос не может быть глупым, ибо есть свидетельство работы ума. Что глупости не свойственно. |
|
|
|
|
25 Apr 2009, 18:34
Сообщение
#8
|
||
|
Advanced Member Группа: Moderators Сообщений: 841 Регистрация: 27-December 07 Из: Москва Пользователь №: 57 Место Жительства:Москва Возраст:68 |
Еще один монстр из серии винтовых.
Проверено - спокойно работает в банке с водой. ( Да и что бы не работать? ) Контроллер позволяет легко менять длину вала, по скольку поставил кнопочку "калибровка". Правда для этого события нужно воткнуть в разъем провода от второго концевого датчика. Ставить его на постоянное место нет смысла, по скольку для обычной работы он не нужен.
Эскизы прикреплённых изображений
-------------------- Самая частая ошибка в том, что мы делаем не так как надо, а так как умеем.
Гремучая змея - очень милое и дружелюбное существо. Надо только знать, как с ней обращаться. Вопрос не может быть глупым, ибо есть свидетельство работы ума. Что глупости не свойственно. |
|
|
|
|
|

|
25 Apr 2009, 20:47
Сообщение
#9
|
|
 Member Группа: Members Сообщений: 14 Регистрация: 14-January 08 Пользователь №: 113 Место Жительства:Ухта-Питер Возраст:45 |
Цитата(Soling @ 24 May 2008, 19:57) ...Отрезать питание силовой части и перепаять провод от аккамуляторов, запитав от него только силовую схему. На логику питание надо подать через стабилизатор... Хочу предостеречь. Далеко не всегда такой подход заработает. Дело в том, что при раздельном питании логики и силовых транзисторов управления двигателем (H-bridge или "моста") неизбежно рассогласование логических уровней идущих от логики на мост. Здесь начало этой проблемы. А здесь ее логическое завершение. |
|
|
|
|
26 Apr 2009, 21:09
Сообщение
#10
|
|
|
Advanced Member Группа: Moderators Сообщений: 841 Регистрация: 27-December 07 Из: Москва Пользователь №: 57 Место Жительства:Москва Возраст:68 |
Цитата(niver @ 25 Apr 2009, 21:47) Спасибо. Надо вникнуть. Пока на сервах с этим везло. Не сталкивался. В чипах драйверов на базе мостов это как то решено. Они допускают одновременное включение по обоим входам. И питание у них раэдельное. Например ТА7291 так сделан. -------------------- Самая частая ошибка в том, что мы делаем не так как надо, а так как умеем.
Гремучая змея - очень милое и дружелюбное существо. Надо только знать, как с ней обращаться. Вопрос не может быть глупым, ибо есть свидетельство работы ума. Что глупости не свойственно. |
|
|
|
|
26 Apr 2009, 21:38
Сообщение
#11
|
|
|
Member Группа: Members Сообщений: 14 Регистрация: 14-January 08 Пользователь №: 113 Место Жительства:Ухта-Питер Возраст:45 |
Цитата(Soling @ 26 Apr 2009, 21:09) Спасибо. Надо вникнуть. Пока на сервах с этим везло. Не сталкивался. В чипах драйверов на базе мостов это как то решено. Они допускают одновременное включение по обоим входам. И питание у них раэдельное. Например ТА7291 так сделан. В ТА7291 мост реализован на транзисторах одной проводимости (КПД у него меньше). Плюс логика управления мостом встроенная. А когда мост навесной и на комплементарных парах- такое не прокатит. |
|
|
|
|
26 Apr 2009, 22:00
Сообщение
#12
|
|
|
Advanced Member Группа: Moderators Сообщений: 841 Регистрация: 27-December 07 Из: Москва Пользователь №: 57 Место Жительства:Москва Возраст:68 |
Тут вся засада в том, что в сервах ставят то, что хоцца производителю. Разбираться с каждой из них - не рентабельно по времени. Имеет смысл только тогда, когда это будет использоваться в собственной разработке. А тут пришел к выводу, что пора переходить на микроконтроллеры. Гибко, просто, и... интересно.
 Проблемы с силовой частью тоже решаются программно. Лафа. 
-------------------- Самая частая ошибка в том, что мы делаем не так как надо, а так как умеем.
Гремучая змея - очень милое и дружелюбное существо. Надо только знать, как с ней обращаться. Вопрос не может быть глупым, ибо есть свидетельство работы ума. Что глупости не свойственно. |
|
|
|
|
26 Apr 2009, 22:15
Сообщение
#13
|
|
|
Newbie Группа: Members Сообщений: 4 Регистрация: 8-January 08 Пользователь №: 97 Место Жительства:Мариуполь, Украина Возраст:60 |
Цитата(niver @ 26 Apr 2009, 21:38) В ТА7291 мост реализован на транзисторах одной проводимости (КПД у него меньше). Плюс логика управления мостом встроенная. А когда мост навесной и на комплементарных парах- такое не прокатит. Можно и я спрошу? Я люблю по старинке, база-коллектор-эмиттер, и детальки из железок в ящиках стола. Оптроны вроде не запрещены к применению? Пара мышей, с колесами, на комплементарных парах транзисторов тоже просто, и ни в какой магазин ходить не надо, все дома. А для юных дарований - практика проектирования схем из элементарных компонентов. А то "драйверы", их схемы, их цены... |
|
|
|
|
26 Apr 2009, 23:22
Сообщение
#14
|
|
|
Advanced Member Группа: Moderators Сообщений: 841 Регистрация: 27-December 07 Из: Москва Пользователь №: 57 Место Жительства:Москва Возраст:68 |
Цитата(Анатолий @ 26 Apr 2009, 23:15) А для юных дарований - практика проектирования схем из элементарных компонентов. А то "драйверы", их схемы, их цены... Ну, Толя, эт обижаешь.  И так выкладываю с явным упором на "старые железки". И без применения сложных самодельных деталей. В последней машинке сделан только фланец крепления к мотору трубы. Остальное - кусок телескопической антенны, кембрик, винтовая шпилька из магазина... куда проще??? По "мышкам". Их применение ни чем не запрещено. Сдерживает только одно - для судо актуально наличие воды там, где не надо. Потому есть смысл делать влаго защиту по максимуму. Оптопара тут явно проигрывает датчикам Холла, например. Или индуктивным. В остальном, почему бы и нет? Можно и их ставить. Сообщение отредактировал Soling - 26 Apr 2009, 23:30 -------------------- Самая частая ошибка в том, что мы делаем не так как надо, а так как умеем.
Гремучая змея - очень милое и дружелюбное существо. Надо только знать, как с ней обращаться. Вопрос не может быть глупым, ибо есть свидетельство работы ума. Что глупости не свойственно. |
|
|
|
|
26 Apr 2009, 23:28
Сообщение
#15
|
|
|
Newbie Группа: Members Сообщений: 4 Регистрация: 8-January 08 Пользователь №: 97 Место Жительства:Мариуполь, Украина Возраст:60 |
Цитата(Soling @ 26 Apr 2009, 23:22) В последней машинке сделан только фланец крепления к мотору трубы. Остальное - кусок телескопической антенны, кембрик, винтовая шпилька из магазина... куда проще??? Во! Кусочек термоусадки , один конец на шпильку, второй на вал мотора шпильке встык, если момента одного слоя не хватит, сверху второй посадить, рацуха? А так классно, я ничего не говорю , только хвалю. |
|
|
|
|
26 Apr 2009, 23:35
Сообщение
#16
|
|
|
Advanced Member Группа: Moderators Сообщений: 841 Регистрация: 27-December 07 Из: Москва Пользователь №: 57 Место Жительства:Москва Возраст:68 |
Цитата(Анатолий @ 27 Apr 2009, 00:28) Во! Кусочек термоусадки , один конец на шпильку, второй на вал мотора шпильке встык, если момента одного слоя не хватит, сверху второй посадить, рацуха? А так классно, я ничего не говорю , только хвалю.Есть еще вариант: ПВХ кембрик замачиваем в ацетончике. Одеваем на вал и шпильку. В ацетоне он станет как резинка, старый прием монтажников РЭА. По верху термоусадку и обжимаем. Для верности на валах шлицы можно сделать. Для нагрузки в сервомашинке вполне пойдет. БОльшую может и не выдержать. -------------------- Самая частая ошибка в том, что мы делаем не так как надо, а так как умеем.
Гремучая змея - очень милое и дружелюбное существо. Надо только знать, как с ней обращаться. Вопрос не может быть глупым, ибо есть свидетельство работы ума. Что глупости не свойственно. |
|
|
|
|
27 Apr 2009, 08:06
Сообщение
#17
|
|
|
Member Группа: Members Сообщений: 14 Регистрация: 14-January 08 Пользователь №: 113 Место Жительства:Ухта-Питер Возраст:45 |
В своих переделках я всегда использую принципы целесообразности и доступности. Плюс желание - чуть повозиться для собственного удовольствия. Лежала у меня цифровая серва на 12 кг. Долго лежала. К чему она в метровой яхте? Вот и сделал из нее лебедку. И стоит она уже в почти готовой лодке. Еще лежала лебедка от Хайтека. Ужасно медленная. Тоже переделал. Стала в два раза быстрее. Но это уже на будущее.
А юные дарования быстро взрослеют. И, начиная с детекторных приемников, просто обязаны переходить на микроконтроллеры. Их преимущества очевидны на сегодняшний день. Но я ничего лепить из них не буду. |
|
|
|
|
27 Apr 2009, 15:48
Сообщение
#18
|
|
|
Advanced Member Группа: Moderators Сообщений: 841 Регистрация: 27-December 07 Из: Москва Пользователь №: 57 Место Жительства:Москва Возраст:68 |
Цитата(niver @ 27 Apr 2009, 09:06) В своих переделках я всегда использую принципы целесообразности и доступности. Ну, это как бы само собой... Но у меня есть еще довод за самоделки. По скольку начинал давно и такого сервиса как сейчас не было, сказывается привычка надеяться на свои руки. И плюс - не приспосабливать то что дают а делать то что надо именно для этой модели. Китайцы, конечно, не глупый народ. Много делают. Но, даже при из численности не могут угадать что именно мне надо. Железа в загашниках достаточно, так что могу себе позволить видеть на модели механику сделанную для нее а не переделанную из вертолетной, например. -------------------- Самая частая ошибка в том, что мы делаем не так как надо, а так как умеем.
Гремучая змея - очень милое и дружелюбное существо. Надо только знать, как с ней обращаться. Вопрос не может быть глупым, ибо есть свидетельство работы ума. Что глупости не свойственно. |
|
|
|
|
1 May 2009, 18:36
Сообщение
#19
|
|
|
Advanced Member Группа: Moderators Сообщений: 841 Регистрация: 27-December 07 Из: Москва Пользователь №: 57 Место Жительства:Москва Возраст:68 |
По последнему фото.
Машинка делалась как пробная версия винтовой сервы. Винтовая схема имеет преимущества в простоте и надежности. Контроллер на микропроцессоре. Может быть сложновато, по скольку связано с программированием. Но, за то дает массу преимуществ. 1. Самый "любимый" элемент в сервах - датчик положения, убран как кошмарный сон. 2. Гибкость настройки. Для этого есть кнопочка на плате контроллера. Работает это сейчас так: Ставится винтовой вал нужной длины. Удерживая кнопку калибровки включаем питание. Серва находит ноль отсчета и замеряет в шагах длину вала. Для этого надо, конечно предварительно поставить датчик конца вала. За тем по сигналу контроллера ручка пульта ставится в нижнее положение. По следующему сигналу - в верхнее. После этого можно стартовать. При следующем включении, если не надо менять ничего, все настройки сохранены. На фото не видно датчика положения, по той причине, что его и не было на первом образце. Отсчет велся по импульсам коллектора двигателя. Но, добиться действительно стабильной работы, пока, не получилось. По этому датчик был заменен на оптопару. По механике: Механика упрощена до предела. Корпус сделан из трубки от телескопической антенны. Ходовой винт - покупной, латунный. На ходовую гайку напаян поводок для крепления шкота. Двигатель нужно выбирать исходя из нужного момента и скорости. Простор тут большой. Ну, вот вроде и все. Фото вариантов выложу позже. Прошивку и схему - только после полной отладки. -------------------- Самая частая ошибка в том, что мы делаем не так как надо, а так как умеем.
Гремучая змея - очень милое и дружелюбное существо. Надо только знать, как с ней обращаться. Вопрос не может быть глупым, ибо есть свидетельство работы ума. Что глупости не свойственно. |
|
|
|
|
1 May 2009, 21:50
Сообщение
#20
|
|
|
Member Группа: Members Сообщений: 14 Регистрация: 14-January 08 Пользователь №: 113 Место Жительства:Ухта-Питер Возраст:45 |
Цитата(Soling @ 1 May 2009, 18:36) ... Самый "любимый" элемент в сервах - датчик положения, убран как кошмарный сон.... ... Для этого надо, конечно предварительно поставить датчик конца вала..... А почему бы калибровку (конечные точки) не сделать по резкому возрастанию токов при упорах в эти конечные точки? Избавляться от кошмарных снов нужно коренным образом. И уж если стоит контроллер, то может, разумнее использовать шаговый двигатель? |
|
|
|
|
1 чел. читают эту тему (гостей: 1, скрытых пользователей: 0)
Пользователей: 0
| Текстовая версия | Сейчас: 20th April 2025 - 19:58 |
Powered By IP.Board
© 2025 IPS, Inc.